decoding La Crosse TX20 Anemometer data with Arduino
Thanks to the excellent work done by John Geek I wrote a small sketch for Arduino to decode and display data coming from the anemometer.
A simple level translator is needed to adapt the signal coming from the anemometer to Arduino board.
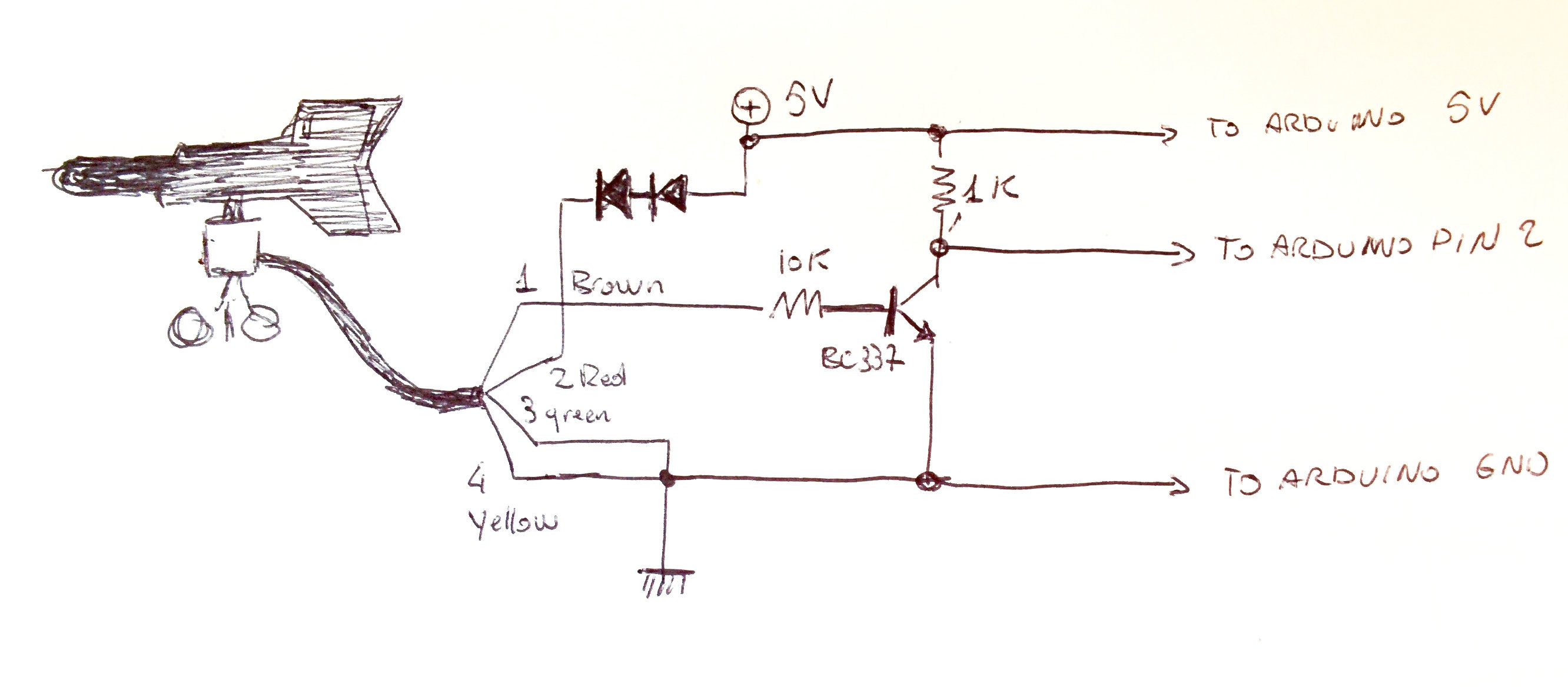
The level translator also inverts the signal coming from pin 1 of the anemometer.
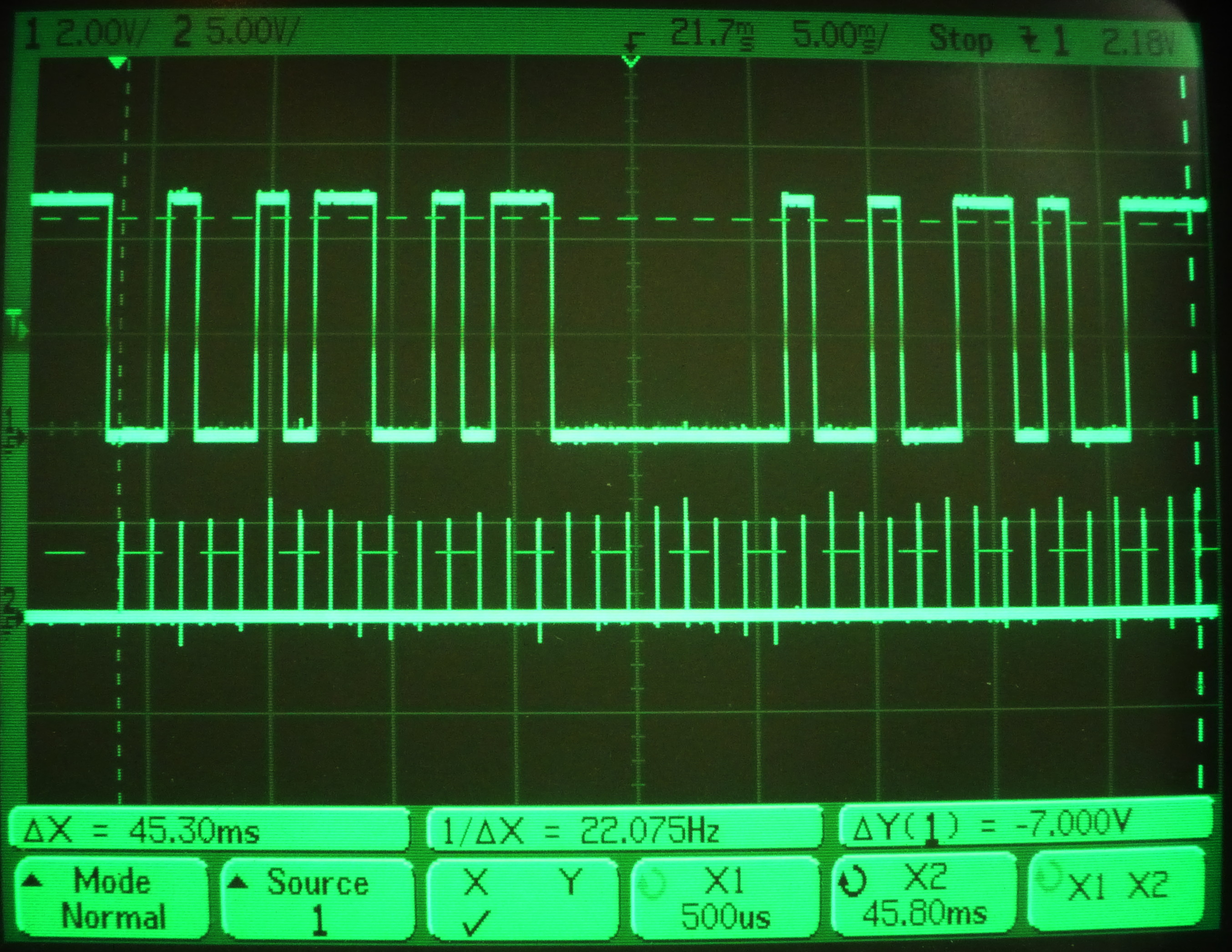
The following picture shows on the top track the frame coming from TX20, on the lower track the sampling signal, used to debug the sketch.

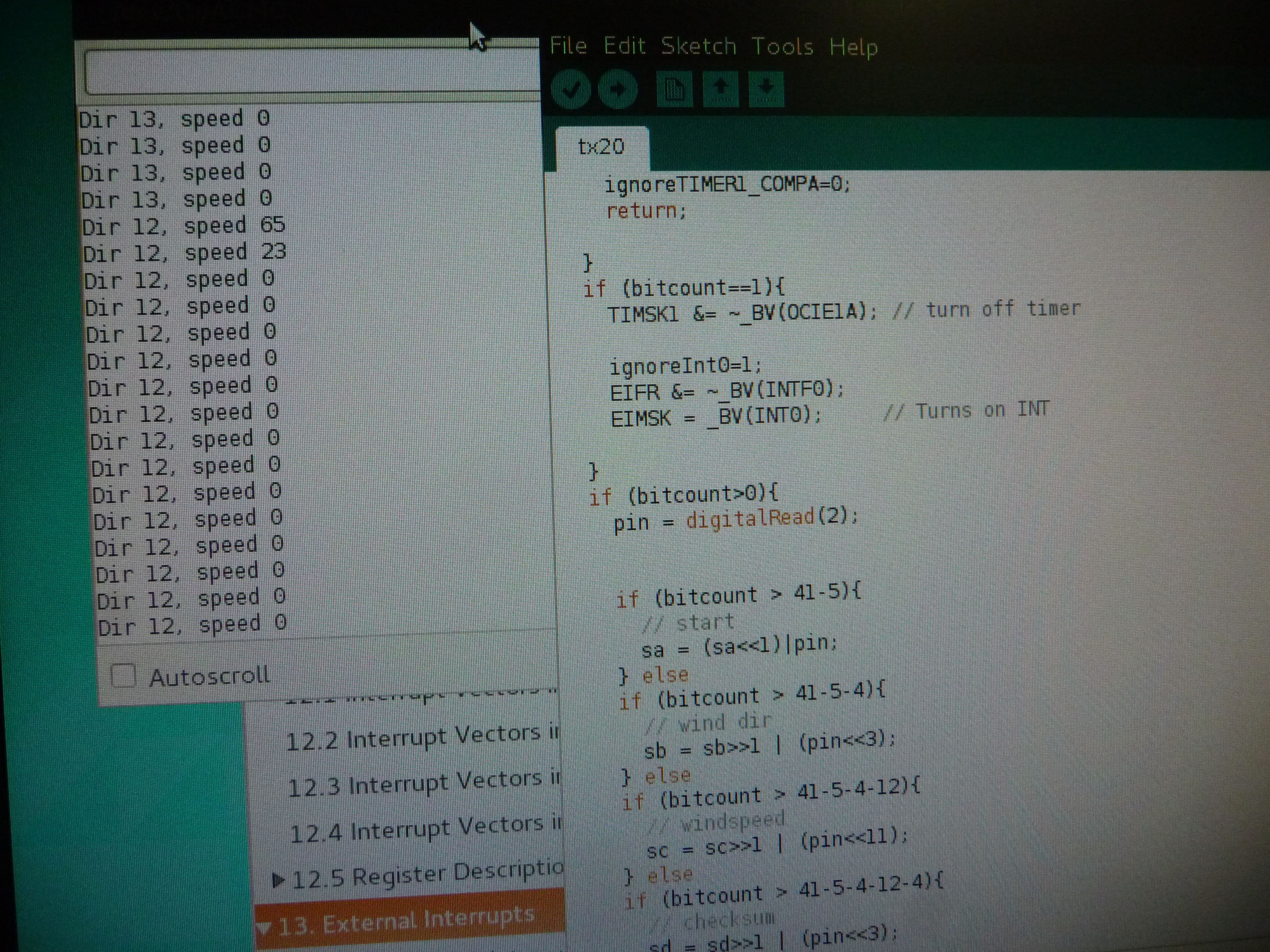
The sketch is a proof of concept, it simply prints out the data coming from the anemometer, and can be used as starting point to develop more complex projects.
#include <avr io.h=""> #include <avr interrupt.h=""> #define _MDEBUG unsigned int icr1; void setup() { // Initialize the digital pin as an output. // Pin 13 has an LED connected on most Arduino boards #ifdef _MDEBUG pinMode(13, OUTPUT); #endif Serial.begin(9600); pinMode(2, INPUT); EICRA = _BV(ISC01); // set INT0 to trigger on falling edge EIMSK = _BV(INT0); // Turns on INT0 icr1 = 19500; TCCR1A = 0; // set entire TCCR1A register to 0 TCCR1B = 0; // same for TCCR1B OCR1A = icr1; } volatile int rx=0; volatile int bitcount=0; volatile char pin; volatile unsigned char sa,sb,sd,se; volatile unsigned int sc,sf; void loop(){ char a[90]; unsigned char chk; // Main code loop // TODO: Put your regular (non-ISR) logic here if (rx){ chk= ( sb + (sc&0xf) + ((sc>>4)&0xf) + ((sc>>8)&0xf) );chk&=0xf; if (sa==4 && sb==se && sc==sf && sd==chk){ sprintf (a,"%d\t%d\n",sb,sc); Serial.write (a); } rx=0; } } // pin change interrupt ( start of frame ) ISR (INT0_vect){ // reset accumulators sa=sb=sd=se=0; sc=0;sf=0; EIMSK &= ~_BV(INT0); // disable pin interrupt bitcount=41; TCCR1B = 0; // stop timer TCNT1 = icr1>>1; // set counter TIFR1 |= _BV(OCF1A); // clear timer interrupt TCCR1B = _BV(WGM12)| _BV(CS10); // start timer TIMSK1 |= _BV(OCIE1A); // enable timer interrupt } // timer irq ( bit accumulator ) ISR(TIMER1_COMPA_vect){ if (bitcount==1){ TIMSK1 &= ~_BV(OCIE1A); // disable timer interrupt EIFR |= _BV(INTF0); // clear pin interrupt flag EIMSK = _BV(INT0); // enable pin interrupt flag for next frame } if (bitcount>0){ pin = digitalRead(2); if (bitcount > 41-5){ // start sa = (sa<<1)|pin; } else if (bitcount > 41-5-4){ // wind dir sb = sb>>1 | (pin<<3); } else if (bitcount > 41-5-4-12){ // windspeed sc = sc>>1 | (pin<<11); } else if (bitcount > 41-5-4-12-4){ // checksum sd = sd>>1 | (pin<<3); } else if (bitcount > 41-5-4-12-4-4){ // wind dir, inverted se = se>>1 | ((pin^1)<<3); } else { // windspeed, inverted sf = sf>>1 | ((pin^1)<<11); } //digitalWrite( 13, digitalRead( 13 ) ^ 1 ); #ifdef _MDEBUG digitalWrite( 13, 0 ); digitalWrite( 13, 1 ); digitalWrite( 13, 1 ); digitalWrite( 13, 0 ); #endif bitcount--; if (bitcount==0){ // all data received: rx=1; } } } </avr></avr>



Stai leggendo “ decoding La Crosse TX20 Anemometer data with Arduino ”, un post di Fabrizio Zellini
- Pubblicato il
- 8 Febbraio 2015
- Categorie:
- elettronica
15 Commenti
commenta | feed commenti [?] | trackback uri [?]